Ποια είναι αυτή; Ότι οι άνθρωποι μπορούν να αντιλαμβάνονται αντικείμενα θαμμένα κάτω από χαλαρούς κόκκους πολύ πριν τα αγγίξουν. Η αίσθηση αυτή, που ονομάζεται απομακρυσμένη αφή, είναι διακριτική, σχεδόν κρυμμένη, αλλά αρκετά ισχυρή ώστε να επαναπροσδιορίζει τα όρια της ανθρώπινης αφής και να ανοίγει νέους δρόμους για ρομποτική και τεχνητή νοημοσύνη.
Η αφή συχνά θεωρείται ως κάτι που λειτουργεί μόνο όταν το δέρμα μας έρχεται σε επαφή με κάτι στερεό. Ωστόσο, πολλά ζώα χρησιμοποιούν πιο εκτεταμένες μορφές αφής. Τα παρυδάτια πουλιά, όπως οι σκαλίδρες, εντοπίζουν τροφή που δεν μπορούν να δουν μέσα στην υγρή άμμο. Οι επιστήμονες αναρωτήθηκαν αν και οι άνθρωποι διαθέτουν μια αντίστοιχη, υποτιμημένη ικανότητα.
Το πείραμα με τον θαμμένο κύβο
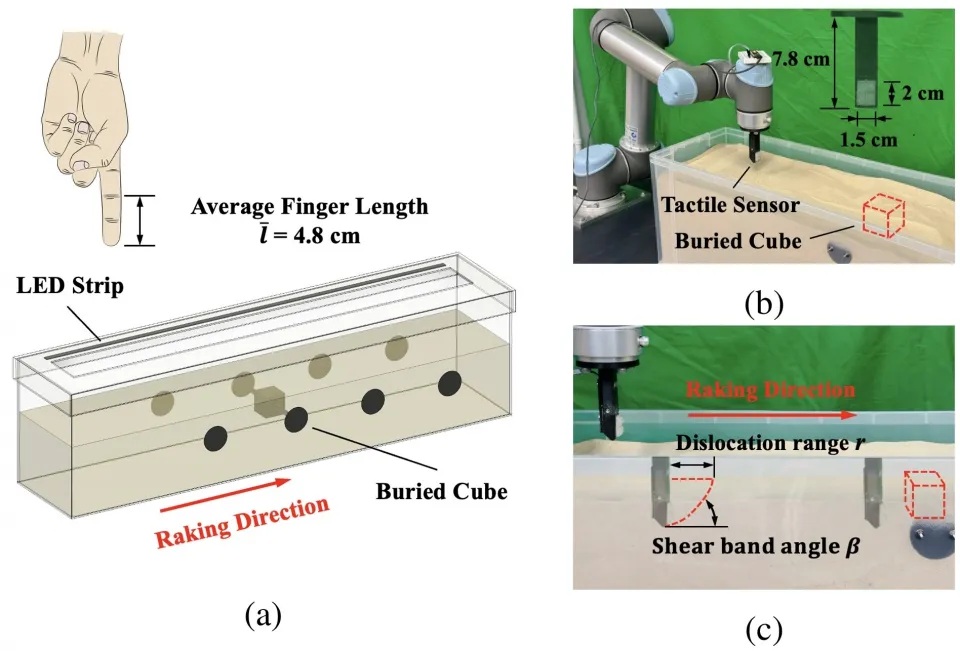
Για να το ελέγξουν, ζήτησαν από δώδεκα εθελοντές, ηλικίας 18 έως 26 ετών, να σύρουν ένα δάχτυλο μέσα σε ξηρή άμμο κλεισμένη σε μακριά, καλυμμένα κουτιά. Τα δάχτυλά τους κινούνταν με σταθερή ταχύτητα δύο εκατοστών ανά δευτερόλεπτο, καθοδηγούμενα από μια λωρίδα με φώτα LED που αναβόσβηναν. Σε κάθε κουτί είχε τοποθετηθεί ένας πλαστικός κύβος πέντε εκατοστών, κρυμμένος κατά μήκος μιας διαδρομής μεγαλύτερης του ενός μέτρου. Οι συμμετέχοντες έπρεπε να σύρουν τα δάχτυλα μέσα από μία σχισμή μέχρι να αισθανθούν κάτι «περίεργο».
Παρά το γεγονός ότι ο κύβος δεν ήταν ορατός, τα δάχτυλά τους αισθάνθηκαν μικρές διαταραχές στη συμπεριφορά της άμμου. Οι κόκκοι μετατοπίζονταν διαφορετικά κοντά στο θαμμένο αντικείμενο, δημιουργώντας μια ζώνη ελαφριάς αντίστασης που γινόταν αντιληπτή περίπου 2,7 εκατοστά πριν από την πραγματική επαφή. Στο σύνολο 216 δοκιμών, οι συμμετέχοντες εντόπισαν θαμμένα αντικείμενα χωρίς να τα αγγίξουν 79 φορές, είχαν 35 επαφές, κατέγραψαν 30 ψευδώς θετικά αποτελέσματα και ανέφεραν σωστά «κανένα αντικείμενο» σε 58 περιπτώσεις. Η ανάλυση με εργαλεία της θεωρίας ανίχνευσης σήματος έδειξε υψηλή ευαισθησία, πολύ πάνω από το τυχαίο.
Διαφορές ανθρώπου και ρομπότ
Για να συγκριθεί η ανθρώπινη ικανότητα με μια τεχνολογική προσομοίωση, οι ερευνητές κατασκεύασαν και ένα ρομποτικό δάχτυλο. Ένας βραχίονας UR5 κινούσε μια τεχνητή άκρη δαχτύλου με τέσσερις αισθητήρες δύναμης, σχεδιασμένη ώστε να μιμείται το ανθρώπινο μέγεθος. Το ρομπότ εκτέλεσε 120 πανομοιότυπες δοκιμές και τροφοδότησε πέντε μοντέλα μηχανικής μάθησης τύπου LSTM (Long Short-Term Memory), το καθένα με διαφορετικό όριο ανίχνευσης, από 3 έως 11 εκατοστά.
Το χαμηλότερο όριο παρήγαγε τα πιο ισορροπημένα αποτελέσματα, με ανίχνευση πραγματικών αντικειμένων σε όλες τις δοκιμές και αποφυγή ψευδών συναγερμών στο 90% των περιπτώσεων. Τα μοντέλα με υψηλότερα όρια ανίχνευσης είχαν μεγαλύτερη εμβέλεια αλλά έκαναν περισσότερα λάθη. Στο υψηλότερο όριο η ακρίβεια έπεσε στο μηδέν, επειδή ο αλγόριθμος αντιμετώπιζε την κανονική κίνηση της άμμου ως απόδειξη ύπαρξης αντικειμένου.
Η ισχυρότερη σύγκριση προέκυψε από την αντιστοίχιση των δεδομένων των ανθρώπων με το ρομποτικό μοντέλο των 7 εκατοστών. Οι ερευνητές τονίζουν ότι η σύγκλιση ανθρώπινων και ρομποτικών δεδομένων ανοίγει νέες προοπτικές για τεχνολογίες που ενισχύουν την ανθρώπινη αντίληψη σε χώρους όπου η όραση αποτυγχάνει. Από επίγειες αρχαιολογικές ανασκαφές και επιχειρήσεις διάσωσης έως αποστολές σε πλανήτες με ασταθή εδαφικά στρώματα, η κατανόηση αυτού του «απομακρυσμένου αγγίγματος» μπορεί να αλλάξει τον τρόπο με τον οποίο εξερευνούμε περιβάλλοντα χαμηλής ορατότητας. Τα ευρήματα της μελέτης δημοσιεύτηκαν στο περιοδικό IEEE Xplore.