

Ομάδα ερευνητών κατασκεύασε έναν νέο τύπο πρωτότυπου μαλακού ρομπότ για να μπορεί να αντέξει στις πιέσεις στον βυθό του ωκεανού.
Οι ερευνητές εμπνεύστηκαν από το ψάρι τύπου snailfish, που ονομάζεται «Pseudoliparis swirei» και το οποίο κολυμπά στον πυθμένα της Τάφρου των Μαριανών (Mariana Trench) σε βάθος άνω των 8.000 μέτρων, και κατασκεύασαν το ρομπότ.
Υποστηρίζουν ότι ένα μαλακό ρομπότ θα μπορούσε να είναι πιο ευέλικτο και αξιόπιστο στο βάθος του ωκεανού από άλλα μηχανήματα που απαιτούν συστήματα αντιστάθμισης πίεσης.
Το συγκεκριμένο ρομπότ της ομάδας του Guorui Li από το Πανεπιστήμιο Zhejiang κατάφερε να φτάσει στην Τάφρο των Μαριανών, το βαθύτερο μέρος του ωκεανού, όπως αναφέρει το ert.gr.
Τα ευαίσθητα ηλεκτρονικά εξαρτήματα του ρομπότ είναι επενδυμένα με μαλακή σιλικόνη κι έτσι δεν χρειάζεται τα περιβλήματα προκειμένου να είναι ανθεκτικά στην πίεση.
Το πεδίο της μαλακής ρομποτικής εμπνέεται σε μεγάλο βαθμό από ζωντανούς οργανισμούς και περιλαμβάνει την κατασκευή ρομπότ από εύκαμπτα υλικά.
Συχνά χρησιμοποιούνται πολυμερή όπως η σιλικόνη, καθώς και άλλα υλικά όπως υφάσματα.
Τα θαλάσσια είδη όπως το καλαμάρι και το χταπόδι ήταν μια από τις αρχικές εμπνεύσεις για την έρευνα της μαλακής ρομποτικής.
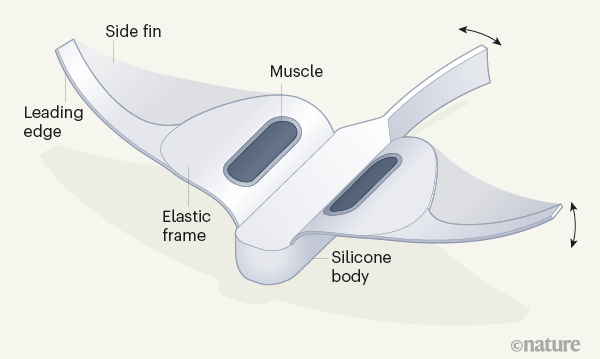
Το ρομπότ, το οποίο μοιάζει στο σχήμα με σαλάχι, κουνάει τα πτερύγια του, τα οποία συνδέονται με τους «μύες» που βρίσκονται στο σώμα του. Οι μύες αυτοί είναι κατασκευασμένοι από μαλακό υλικό το οποίο μετατρέπει την ηλεκτρική ενέργεια σε μηχανική, που σημαίνει ότι όταν το ηλεκτρικό ρεύμα της μπαταρίας του ρομπότ φτάνει στους μύες, αυτοί συστέλλονται. Μικροσκοπικές στερεές δομές συνδέουν μηχανικά τους συστέλλοντες μύες στα πτερύγια, με αποτέλεσμα αυτά να κουνιούνται.
Ο Li και οι συνεργάτες του βρήκαν έναν τρόπο να προστατεύσουν τα ηλεκτρονικά εξαρτήματα του ρομπότ από τις υψηλές πιέσεις. Η ομάδα τοποθέτησε τα ηλεκτρονικά εξαρτήματα σε απόσταση μεταξύ τους, κάτι που δεν συνηθίζεται στις ηλεκτρονικές συσκευές.
Αυτή η προσέγγιση είναι πιο πρακτική και φθηνότερη από άλλες μεθόδους προστασίας των ηλεκτρονικών συσκευών βαθέων υδάτων.
Οι ερευνητές τέσταραν αρχικά την ικανότητα του ρομπότ να κολυμπά, μέσα σε ένα θάλαμο υπό πίεση στο εργαστήριο. Το ρομπότ κατάφερε να κολυμπήσει γύρω από έναν στύλο στον οποίο ήταν δεμένο.
Στη συνέχεια κολύμπησε σε μια λίμνη βάθους 70 μέτρων με ταχύτητα 3,16 εκατοστά ανά δευτερόλεπτο και στη συνέχεια στη Θάλασσα της Νότιας Κίνας σε βάθος περίπου 3.200 μέτρων, όπου έπιασε ταχύτητα 5,19 εκ. ανά δευτερόλεπτο.
Το μηχάνημα του Li είναι πιο αργό από άλλα υποβρύχια ρομπότ και θα μπορούσε εύκολα να παρασυρθεί από υποβρύχια ρεύματα. Παρόλα αυτά, η προσέγγιση αυτή θέτει τα θεμέλια για τις μελλοντικές γενιές ανθεκτικών και αξιόπιστων ρομπότ βαθέων υδάτων.
Μακροπρόθεσμα, τα μαλακά ρομπότ θα μπορούν να κολυμπούν με ασφάλεια σε κοραλλιογενείς υφάλους ή υποβρύχιες σπηλιές, για να συλλέξουν ευαίσθητα δείγματα χωρίς να τα καταστρέψουν.











